Roboter
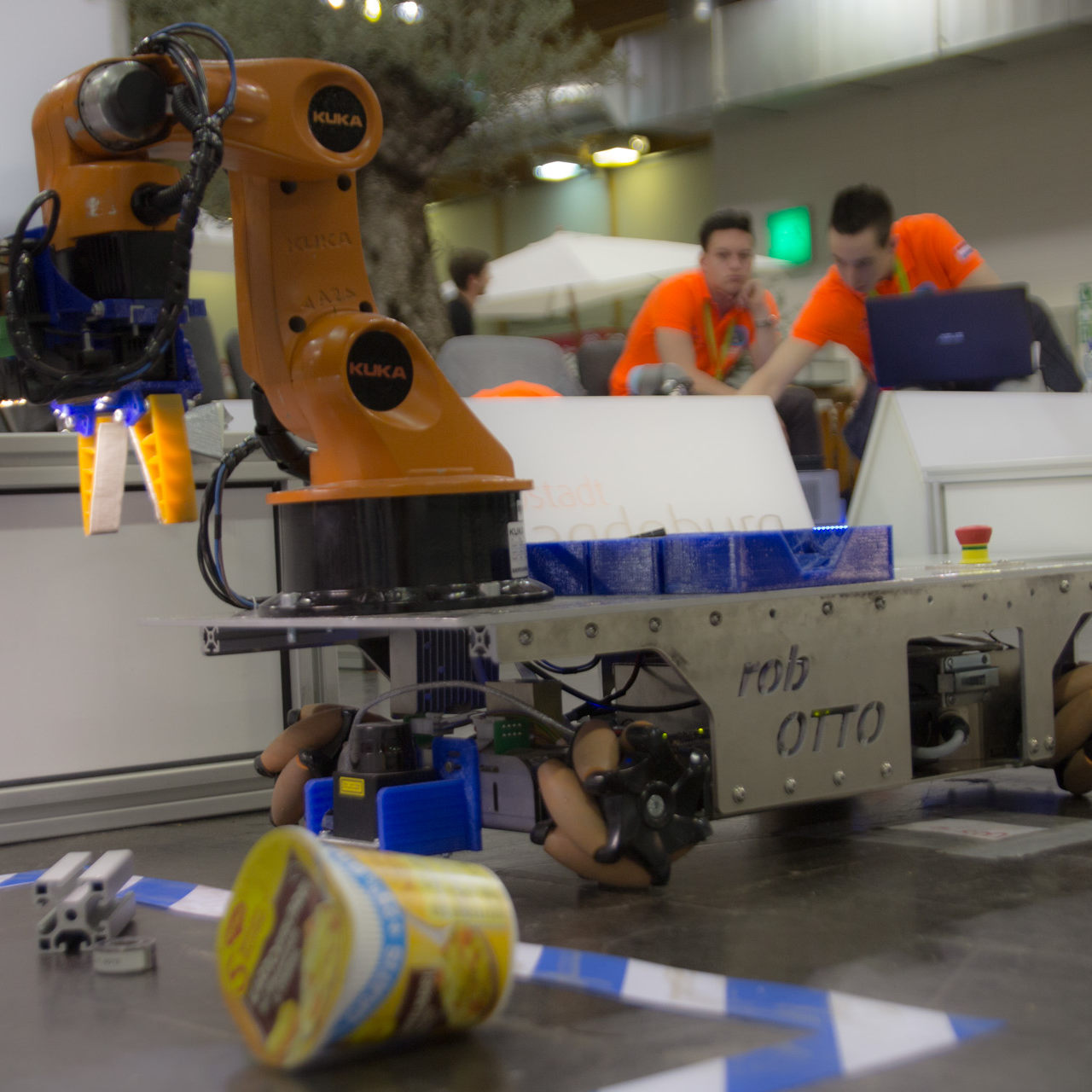
Das Team arbeitete über die Zeit an vielen Generationen des Roboters. Die Entwicklung wechselt zwischen zwei Platformen, von denen eine "im Betrieb" gehalten wird, während an der anderen nach belieben gebastelt werden kann.
Letzte Änderung: 09.04.2026 -
Ansprechpartner: